L’intelligence Artificielle au service de la défense !
Évaluer les trajectoires
Projet man machine teaming - RECO
Exemple de réalisation
Le projet MMT est une initiative lancée et financée par la Direction générale de l’armement (DGA). Elle est animée par Dassault Aviation et Thales.
Dans le cadre de la définition du système de combat aérien futur (SCAF), le projet Man-Machine Teaming (MMT) explore la possibilité de développer un système aérien cognitif.
Problématique
L’objectif est de classifier en temps réel les comportements d’un avion ou d’un groupe d’avions ennemis à partir de leurs trajectoires et de fournir des faisceaux de trajectoires probables correspondant à ces comportements.
Mise en oeuvre / Expertises mobilisées
L’objectif du projet RECO est de remplacer les techniques classiques de classification de trajectoires par des techniques basées sur les réseaux de neurones profonds récurrents.
Résultats
L’Intelligence Artificielle développée sur ce projet a permis :
- d’augmenter la fiabilité des prédictions,
- de gagner en rapidité de calcul pour une utilisation opérationnelle,
- d’augmenter significativement le nombre de comportements reconnaissables,
- d’étendre l’analyse en cas de plusieurs avions attaquants.
« Lorem ipsum dolor sit amet, consectetur adipiscing elit. Fusce eu lacus diam. Cras congue, neque ac mattis efficitur, nibh ipsum fringilla nunc, sed iaculis neque odio non orci. Vestibulum ante ipsum primis in faucibus orci luctus et ultrices posuere cubilia Curae; Praesent lacinia, urna quis rhoncus lobortis, urna neque tempus tellus, quis auctor justo lectus vitae libero. Nulla non porta odio. Donec diam est, varius id ullamcorper a, efficitur nec libero »
Nom Prénom
Fonction – Entreprise

Quelques exemples :
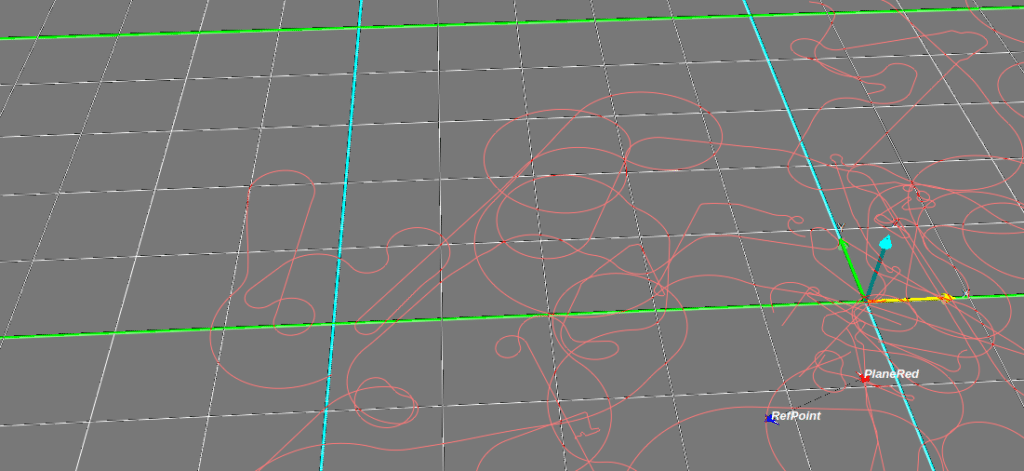
Évaluation de trajectoires - MMT
Détecter les manœuvres d’un ou plusieurs avion(s) ennemi(s)
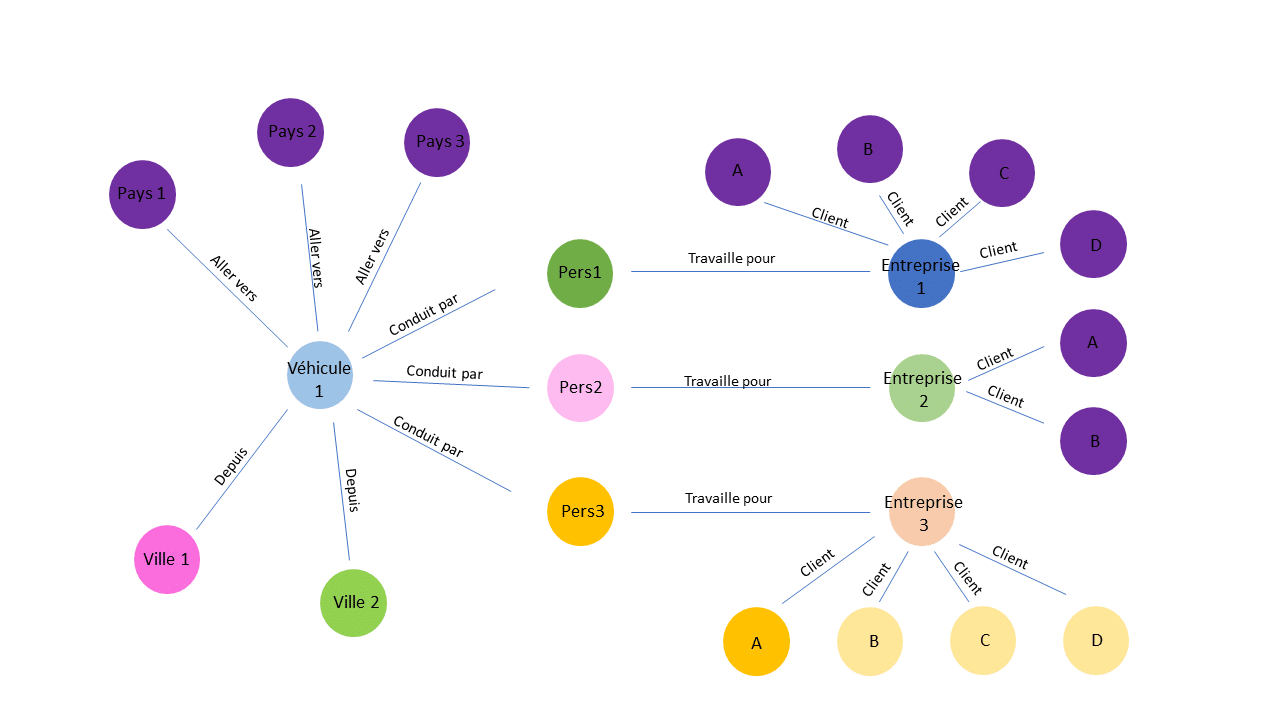
Raisonnement sur un environnement tactique probabiliste - MMT
Conception d’un module de raisonnement de haut niveau basé sur une ontologie

Navigation par SOP
Géolocalisation de véhicule autonome

Création de trajectoires missiles, en temps réel - MCM ITP
Évaluer les marges de sécurité anti-collision et calculer les trajectoires optimum de missile
Copyright 2019 – Probayes – 53 avenue Jean Kuntzmann – 38330 Montbonnot – France – Tel: +33 (0)4 76 42 64 13
Mentions légales et conditions générales d’utilisations – Politique de protection des données du site internet de Probayes – Politique Cookies