L’intelligence Artificielle au service de la défense !
Naviguer par SOP (Signal of OPportunity)
Exemple de réalisation
Dans les espaces aériens et terrestres complexes, le système de positionnement global est difficile, car les signaux de navigation sont facilement masqués par les barrières naturelles (montagnes, etc.).
Les signaux d’opportunité peuvent alors, être la solution afin d’améliorer la disponibilité des différents signaux.
Problématique
L’objectif est de géolocaliser le véhicule autonome à tout moment et d’assurer cette géolocalisation par le GPS couplé à une centrale inertielle embarquée.
L’exploitation des signaux radiofréquences, appelés signaux d’opportunité (télécommunication, radars, etc.) aide le véhicule à se localiser en cas de perte du signal GPS.
Mise en oeuvre / Expertises mobilisées
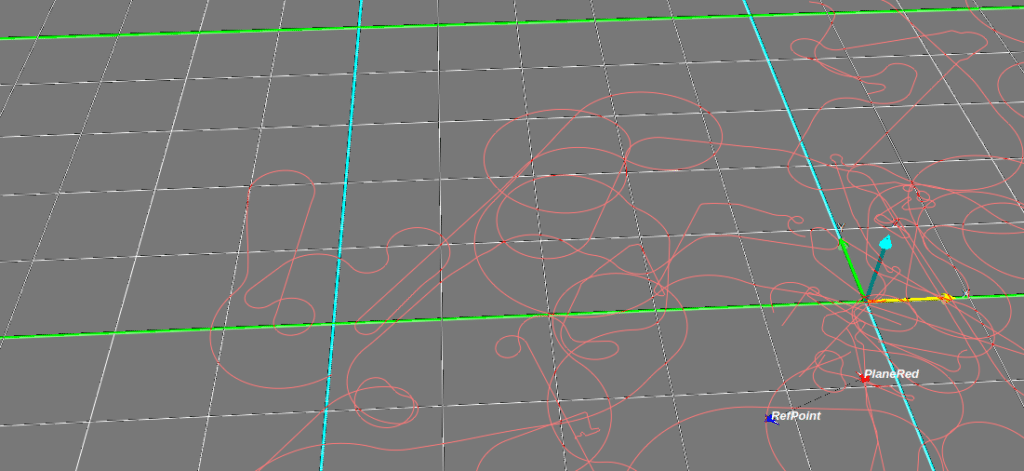
La première étape consiste à accumuler dans le temps des informations mesurables au moyen d’un filtre de kalman afin de mesurer :
- l’effet Doppler pour identifier si le véhicule se rapproche ou s’éloigne de la source,
- la direction des signaux reçus via un réseau d’antennes embarqué.
Enfin, il s’agit de géolocaliser des sources du véhicule avec plus de précision en l’absence de GPS.
Résultats
Dès la présence d’une source émettrice de signaux d’opportunité, l’incertitude sur la position et la vitesse du véhicule est réduite lors d’une perte de GPS.
Plus le nombre de sources augmente, plus l’incertitude diminue.
Cette géolocalisation par signaux d’opportunité ne nécessite pas de connaître a priori la position des sources ni d’extraire le contenu des signaux reçus, ce qui rend son usage universel.
« Lorem ipsum dolor sit amet, consectetur adipiscing elit. Fusce eu lacus diam. Cras congue, neque ac mattis efficitur, nibh ipsum fringilla nunc, sed iaculis neque odio non orci. Vestibulum ante ipsum primis in faucibus orci luctus et ultrices posuere cubilia Curae; Praesent lacinia, urna quis rhoncus lobortis, urna neque tempus tellus, quis auctor justo lectus vitae libero. Nulla non porta odio. Donec diam est, varius id ullamcorper a, efficitur nec libero »
Nom Prénom
Fonction – Entreprise
Quelques exemples :
Évaluation de trajectoires - MMT
Détecter les manœuvres d’un ou plusieurs avion(s) ennemi(s)
Raisonnement sur un environnement tactique probabiliste - MMT
Conception d’un module de raisonnement de haut niveau basé sur une ontologie

Navigation par SOP
Géolocalisation de véhicule autonome

Création de trajectoires missiles, en temps réel - MCM ITP
Évaluer les marges de sécurité anti-collision et calculer les trajectoires optimum de missile
Copyright 2019 – Probayes – 53 avenue Jean Kuntzmann – 38330 Montbonnot – France – Tel: +33 (0)4 76 42 64 13
Mentions légales et conditions générales d’utilisations – Politique de protection des données du site internet de Probayes – Politique Cookies